Hoe kunnen we ervoor zorgen dat automatisch varende schepen in de haven van Rotterdam minder fijnstof en CO2 uitstoten? Die vraag stond centraal in het Resilient Delta project DigiPACT, dat van november 2022 tot en met mei 2023 in samenwerking met Deltares en DigiShape is uitgevoerd. In het project werd de basis gelegd voor het realtime aanpassen van de route en snelheid van autonome schepen. Een inspirerende innovatie met modelschepen die de weg vrijmaakt voor toepassing op grote schaal.
Testen in een operationele setting
“In dit project is het ons gelukt om schepen in een operationele setting automatisch slim gebruik te laten maken van omgevingsinformatie,” vertelt prof. dr. ir. Mark van Koningsveld van TU Delft Civiele Techniek en Geowetenschappen (CiTG). “Het resultaat: verbeterde rekenmodellen, open source code en software, die het in de toekomst mogelijk maken om autonome schepen in de haven schoner te laten varen dan nu.”
Fedor Baart van Deltares was samen met CITG masterstudent Max van Gijn verantwoordelijk voor het ontwikkelen en testen van modules die de modelschepen in de vijver aanstuurden: “Binnen DigiPACT hebben we een aantal simulaties ontwikkeld, waardoor schepen straks efficiënter door de haven kunnen gaan varen. Bijvoorbeeld door gas terug te nemen als de aanlegplek nog niet vrij is of door te wachten op gunstige getijstromingen. Ook kan de route wat worden aangepast: welke terminal bezoek je eerst? We noemen deze twee strategieën respectievelijk ‘green steaming’ en ‘green routing’ en kunnen deze ook met elkaar combineren.”
DigiPACT vaart realtime mee met autonome schepen
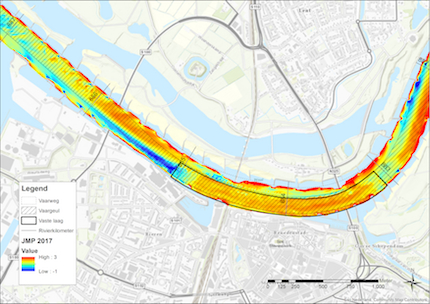
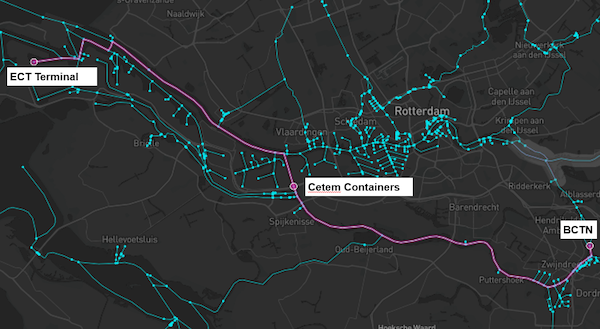
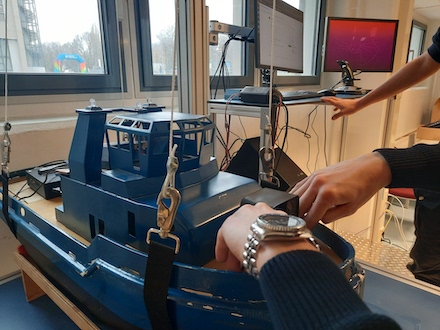 De simulaties in DigiPACT zijn ontwikkeld in een digital twin van het Nederlandse vaarwegennetwerk waar de Rotterdamse haven ook in is opgenomen. Een relevante subset van dit netwerk werd in de vijver van de TU Delft geprojecteerd. In bestaande software voor scheepvaartsimulatie (OpenCLSim) is informatie over onder andere de haven en routekeuze ingebouwd. Op het beeldscherm zie je waar de schepen in de vijver varen, hoe snel, welke aanlegplaatsen beschikbaar zijn en waar de kademuren liggen. Een virtuele operator ‘vaart’ mee met de modelschepen, kijkt vooruit en adviseert de schepen een paar keer per seconde over hun optimale route en motorstand. Uiteindelijk is het op deze manier gelukt om automatisch varende schepen met behulp van simulaties realtime aan te sturen.
De simulaties in DigiPACT zijn ontwikkeld in een digital twin van het Nederlandse vaarwegennetwerk waar de Rotterdamse haven ook in is opgenomen. Een relevante subset van dit netwerk werd in de vijver van de TU Delft geprojecteerd. In bestaande software voor scheepvaartsimulatie (OpenCLSim) is informatie over onder andere de haven en routekeuze ingebouwd. Op het beeldscherm zie je waar de schepen in de vijver varen, hoe snel, welke aanlegplaatsen beschikbaar zijn en waar de kademuren liggen. Een virtuele operator ‘vaart’ mee met de modelschepen, kijkt vooruit en adviseert de schepen een paar keer per seconde over hun optimale route en motorstand. Uiteindelijk is het op deze manier gelukt om automatisch varende schepen met behulp van simulaties realtime aan te sturen.
“Deze realtime routering van een schip op basis van nieuwe informatie is zeer innovatief en logistiek gezien erg belangrijk,” licht prof. dr. Rob Zuidwijk van de Erasmus Universiteit Rotterdam (EUR) toe. “Door DigiPACT hebben we veel geleerd over de manier waarop technische en logistieke aspecten van het navigeren van schepen met elkaar samenhangen en hoe ‘the devil in the details’ zit. In onder meer het vervolgproject PATH2ZERO kunnen we deze resultaten goed benutten.”
Synergie tussen samenwerkingspartners leidt tot nieuwe inzichten
Het innovatieve karakter van DigiPACT is voor een groot deel te danken aan de synergie tussen de samenwerkingspartners: iedereen bracht unieke expertise in. De Erasmus Universiteit leverde wetenschappelijke kennis vanuit het logistieke domein, Deltares ontwikkelde en testte de modules, DigiShape en Resilient Delta waren vanuit organisatorisch en juridisch oogpunt betrokken en de TU Delft leverde technisch wetenschappelijke kennis en faciliteiten. Zo bracht de faculteit CiTG bestaande software voor scheepvaartsimulatie (OpenCLSim) in en voegde informatie over de Rotterdamse haven en kades toe.
De basis voor het realtime deel van het onderzoek kwam vanuit het ResearchLab Autonomous Shipping (RAS) van de TU Delft. Zij stelden hun framework voor automatisch varen ter beschikking, de faciliteiten voor realtime datacollectie en systeemmonitoring, het Robotic Operating System en de testvijver. Bart Boogmans van het RAS-lab: “Het doel van ons framework voor autonomic shipping is om de interactie met schepen zo makkelijk te maken. Daarvoor regelen we veel dingen ‘onder de motorkap’, zodat onderzoekers en studenten kunnen focussen op het element waar hun interesse naar uitgaat. In dit geval was dat de planningslaag van shipping automation. Voor ons levert deze use case weer inzicht op in wat we kunnen verbeteren en we nemen de ontwikkelde modules op in onze toolbox.”
Ook de gemeente Rotterdam was betrokken om input te geven over de vraagstukken waar de stad mee te maken heeft. “Er zijn nog weinig inzichten in de maatregelen die een stad kan nemen om de uitstoot te verminderen,” merkt Fedor Baart op. “Waar moet je bijvoorbeeld snelheidsbeperkingen doorvoeren? En op welke plaatsen moeten er aanlegplekken en walstroom bij komen? Modellen, zoals ontwikkeld in DigiPACT, kunnen beleidsmakers van belangrijke informatie voorzien om in dit soort complexe settings toch de beste keuzes te maken.”
Open source code voor iedereen beschikbaar
Om de inzichten, die binnen DigiPACT op labschaal zijn gerealiseerd, uiteindelijk op de vaarweg in de praktijk te brengen, moet er nog wel wat gebeuren. Het NWO-NWA-project PATH2ZERO, waarin DigiShape, Deltares, Erasmus Universiteit Rotterdam en TU Delft ook een rol hebben, neemt de ontwikkelde code mee in een omvangrijk internationaal traject om een digital twin voor vaarwegen te bouwen. Het eindrapport en de thesis van Max van Gijn zijn beschikbaar voor iedereen die ermee verder wil rekenen of ontwikkelen.
In het najaar organiseren de partners een hackaton om oplossingen aan te dragen voor vraagstukken van stakeholders zoals de gemeente, milieudiensten en private partijen. Fedor Baart: “Uiteindelijk gaat het erom dat we naar emissiearm of zelfs emissieloos varen toe gaan. Ik hoop dat wat we nu ontwikkeld hebben over een aantal jaren tot in het gaspedaal van schepen is doorgedrongen!”
In de haven van Rotterdam varen jaarlijks ongeveer 100.000 binnenvaartschepen en 29.000 zeeschepen af en aan. Schepen zijn wereldwijd de meest doelmatige methode voor goederenvervoer, maar in zo’n geconcentreerd gebied als een haven zorgen ze nog steeds voor een flinke uitstoot van CO2 en fijnstof.
Meer informatie en contactpersonen
- Dataset op Zenodo: https://zenodo.org/record/7944056
- Het eindrapport met de ontwikkelde code is op te vragen via Dit e-mailadres wordt beveiligd tegen spambots. JavaScript dient ingeschakeld te zijn om het te bekijken., data science specialist bij Deltares en TU Delft.
- Master thesis Max van Gijn: Bridging the gap bridging the gap between strategy and operations in autonomous maritime logistics
- De OpenCLSim code is te vinden op: https://github.com/TUDelft-CITG/OpenCLSim
- Contact: Dit e-mailadres wordt beveiligd tegen spambots. JavaScript dient ingeschakeld te zijn om het te bekijken. projectleider Resilient Delta en Dit e-mailadres wordt beveiligd tegen spambots. JavaScript dient ingeschakeld te zijn om het te bekijken. van DigiShape
- RAS-lab: www.rasdelft.nl
- Vittorio Garofano: Dit e-mailadres wordt beveiligd tegen spambots. JavaScript dient ingeschakeld te zijn om het te bekijken.
- Bart Boogmans: Dit e-mailadres wordt beveiligd tegen spambots. JavaScript dient ingeschakeld te zijn om het te bekijken.
- Over Resilient Delta en Convergence: Erasmus Universiteit Rotterdam, Erasmus MC en TU Delft hebben hun krachten gebundeld in de Convergence Alliance om hun krachten te bundelen in het Resilient Delta initiatief. Het brengt wetenschap, beleid, industrie en maatschappij samen in een open omgeving voor co-creatie van innovatieve oplossingen voor een veerkrachtigere delta.
Foto 1 en 3: Max van Gijn, TU Delft. Foto 2: Fedor Baart, Deltares